
付録A ◆万一のロボットプログラム消失に備えプログラムデーターをバックアップしておかれることをお勧めいたします
操作ペンダントにGT2505HSまたはGT1450HSを使用の機種であれば、PLC(シーケンサー)及び操作ペンダントGT2505HS,GT1450HSのプログラムデーターのバックアップをSDカードに保存できます。
万一のデータ消失に備え、下記の付録A(1)【GT2505HS-GOT(操作ペンダント)でのPLC及びGOTデータのバックアップとリストアの手順】あるいは、付録A(2)【GT1450HS-GOT(操作ペンダント)でのPLC及びGOTデータのバックアップとリストアの手順】を参照いただき、あらかじめプログラムデーターをバックアップしておかれることを、お勧めいたします。
なお、プログラムデーターのバックアップ及びリストア作業において誤った操作を行うと、不具合が発生する可能性があります。作業は手順を十分理解いただいたうえで、自己責任で行ってください。特にリストア作業を行う場合は、正しいバックアップデーターか十分ご確認のうえ実施してください。
作業に不安がある場合は、三菱電機技術相談窓口(052-712-2417)にお問い合わせください。また三菱電機システムサービス(052-722-7601)に作業を依頼することも可能です。
上記のGT2505HS,GT1450HS以外の操作ペンダントを使用したロボット機種をお使いのユーザー様におかれましては、当社にて据付時のバックアップデーターを提供(有料)できる場合もございますので、ご希望の場合はお問合せください。
付録A(1) GT2505HS-GOT(操作ペンダント)でのPLC及びGOTデータのバックアップとリストアの手順
SDカードの準備
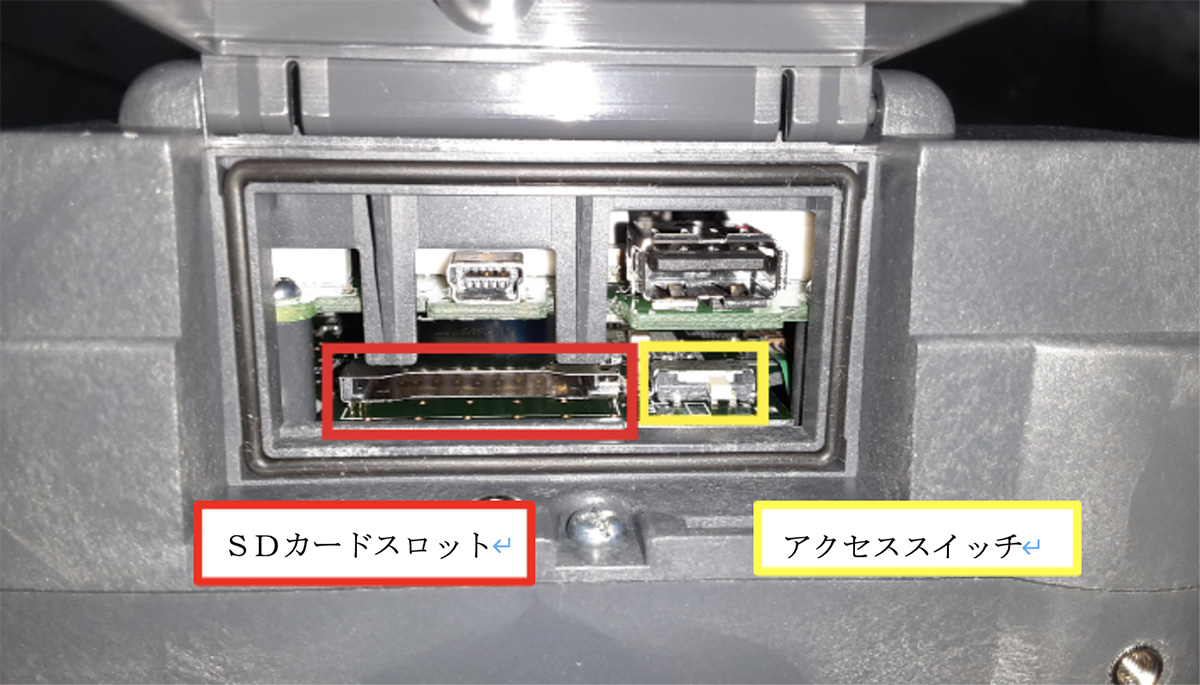
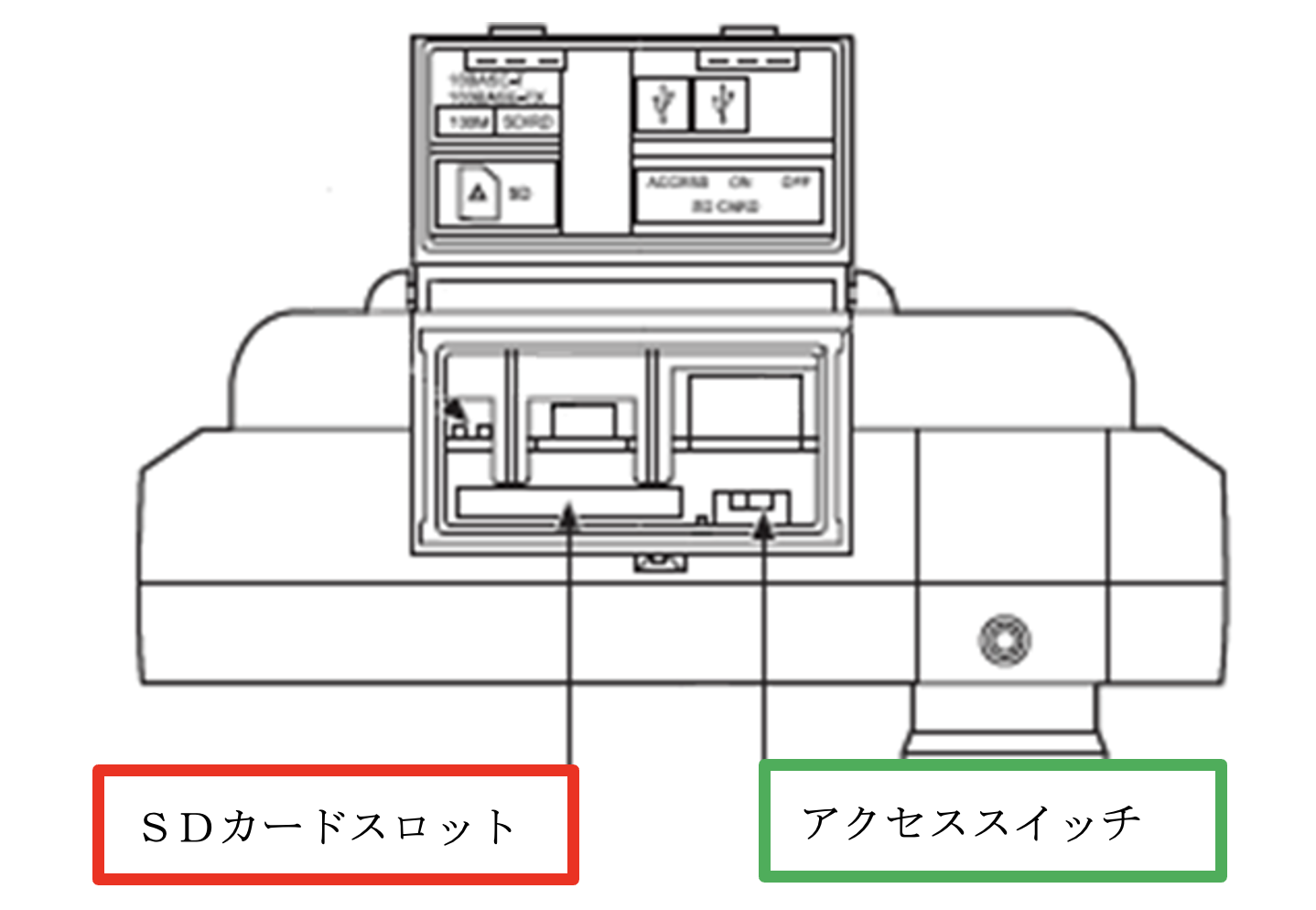
GOT上部のカバーを開けてSDカードを入れます(SDカードは32GB以下のものをパソコンでフォーマットしてご使用ください。またシーケンサーと操作ペンダントのバックアップを取られる場合は別々にSDカードを準備ください)
アクセススイッチをON側にし、緑ランプが点灯することを確認してください。
緑ランプが点灯しない場合はGOTの電源を再投入してください。
※SDカードを取り外すときはアクセススイッチをOFF側にし緑ランプが消灯してから取り外してください。SDカードを押し込めば外せるようになります。
PLC(シーケンサプログラム)のバックアップ
タッチパネル右上端を音がするまで長押しし離し[ユーティリティーメインメニュー]画面を表示させます。
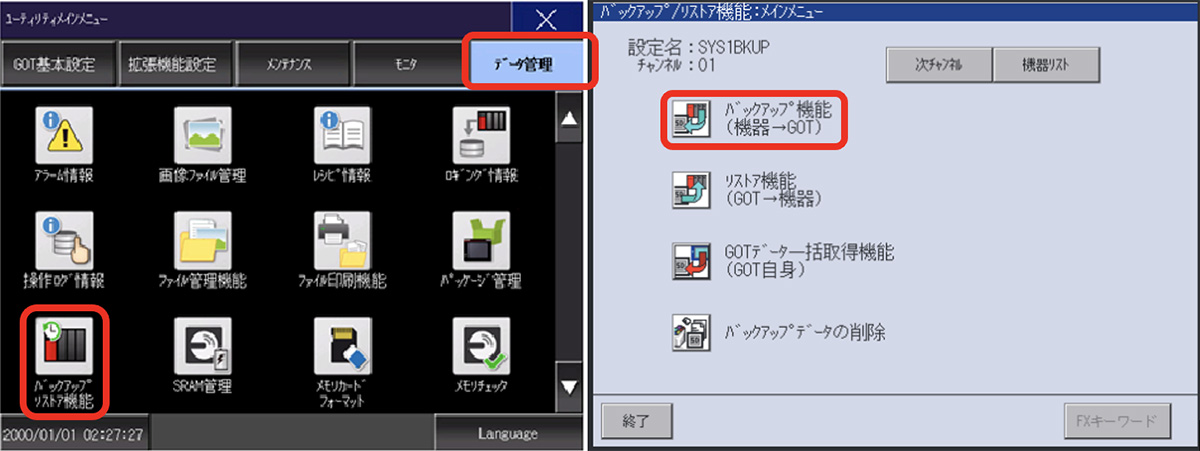
[データ管理]タブ内の[バックアップリストア機能]を選択します。
[バックアップ機能(機器→GOT)]を選択します。
[バックアップを実施します。]と表示されるので[OK]を押します。
Statusにバックアップ中の点滅表示がされるのでしばらく待ちます。
[バックアップ処理が完了しました。]と表示されるので[OK]を押します。
右下の[終了]を押します。
※シンプルモーションユニット(サーボ係)のデータはバックアップされません。
GOT(操作ペンダントプログラム)のバックアップ
シーケンサーのプログラムをバックアップしたSDカードとは別のSDカードを操作ペンダントに挿入し、アクセススイッチをONにしアクセスランプを点灯させてください。ランプが点灯しない場合はGOTの電源を再投入してください。
タッチパネル右上端を音がするまで長押しし離し[ユーティリティーメインメニュー]画面を表示させます。
[データ管理]タブ内の[バックアップリストア機能]を選択します。
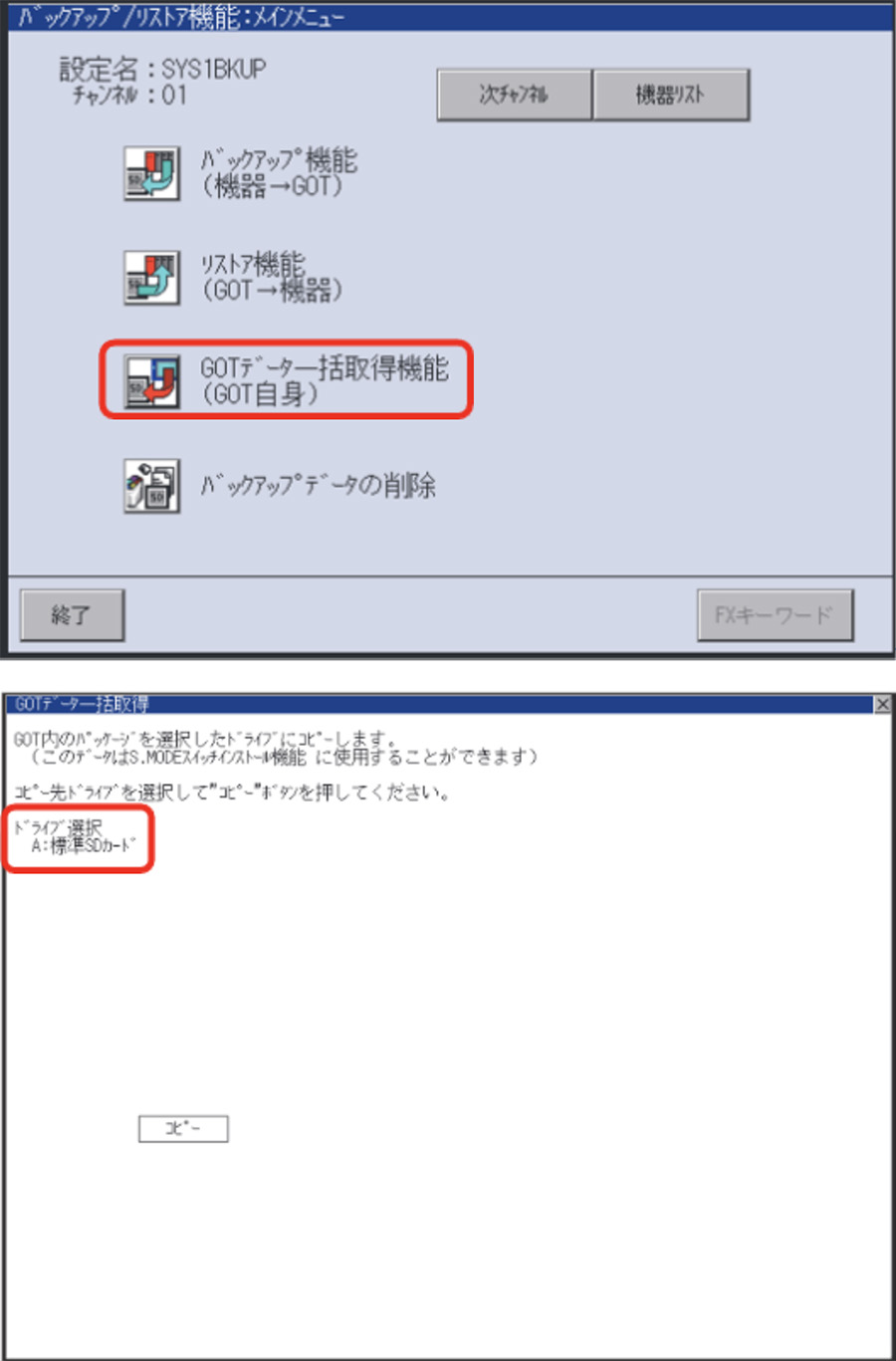
[GOTデータ一括取得機能]を選択します。
[A:標準SDカード]をタッチし反転させ[コピー]を押します。
[コピーしますか?]と表示されるので[OK]を押します。
[本当に実行しますか?]と表示されるので[OK]を押します。
[コピーが完了しました。]と表示されるまで待ち[OK]を押します。
右上の[×]を押します。
バックアップは以上で終了す。万一のプログラム消失に備え、SDカードを保管ください。
PLCのリストア(シーケンサープログラムの復旧)
データをバックアップしたSDカードをGOTに挿入し、アクセススイッチをONにし緑ランプが点灯することを確認してください。緑ランプが点灯しない場合は、GOTの電源を再投入してください。
タッチパネル右上端を音がするまで長押しし離し[ユーティリティーメインメニュー]画面を表示させます。
[データ管理]タブ内の[バックアップリストア機能]を選択します。
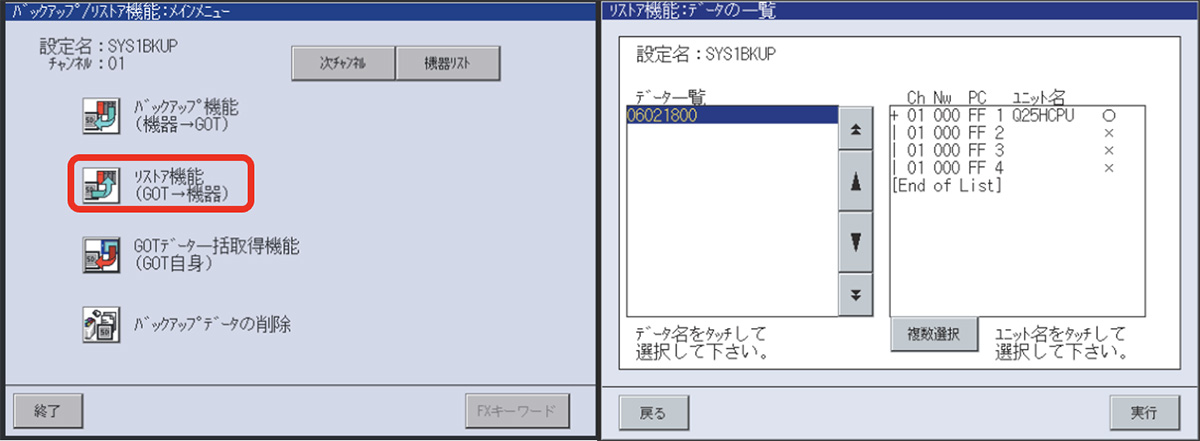
[リストア機能(GOT→機器)]を選択します。
リストアするデータを選択します。
リストア先のユニットを(Q00UCPU)選択します。(黒丸にします)
[実行]を押します。
[リストアを実施します。]と表示されるので[OK]を押します。
[ファイルレジスタをリストアしますか?]と表示されるので[Yes]を押します。
Statusにリストア中の点滅表示がされるのでしばらく待ちます。
[リストア処理が完了しました。]と表示されるので[OK]を押します。
右下の[終了]を押します。
PLCの電源を再投入します。
GOTのリストア(操作ペンダントプログラムの復旧)
GOTの電源を切りタッチパネル右下端を押しながら電源を入れます。
[インストールを実行してもよろしいですか?]と表示されるので[OK]を押します。
[インストール実行中]と表示されるのでしばらく待ちます。
[インストールが完了しました。]と表示されるので[OK]を押します。
*1) 不明な点がありましたら、三菱電機技術相談窓口(tel:052-712-2417)にお問合せください。
付録A(2) GT1450HS-GOT(操作ペンダント)でのPLC及びGOTデータのバックアップとリストアの手順
※シーケンサーQ00UCPUは機能バージョンB以降のものがバックアップ/リストアできます。(バージョンはCPU側面のシリアル番号の末尾に記載)
SDカードの準備
GOT上部のカバーを開けてSDカードを入れます。(SDカードは32GB以下のものをパソコンでフォーマットしてお使いください。またシーケンサーと操作ペンダントのバックアップを取られる場合は別々にSDカードを準備ください)
アクセススイッチをON側にし、ランプが点灯することを確認してください。
ランプが点灯しない場合はGOTの電源を再投入してください。
※SDカードを取り外すときはアクセススイッチをOFF側にしランプが消灯してから取り外してください。SDカードを押し込めば外せるようになります。
PLC(シーケンサプログラム)のバックアップ
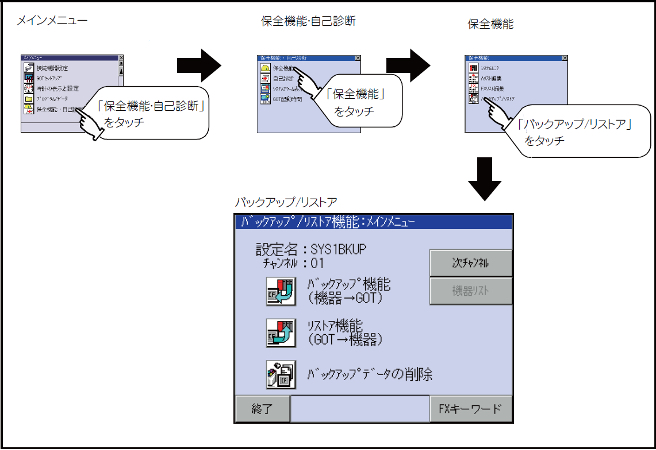
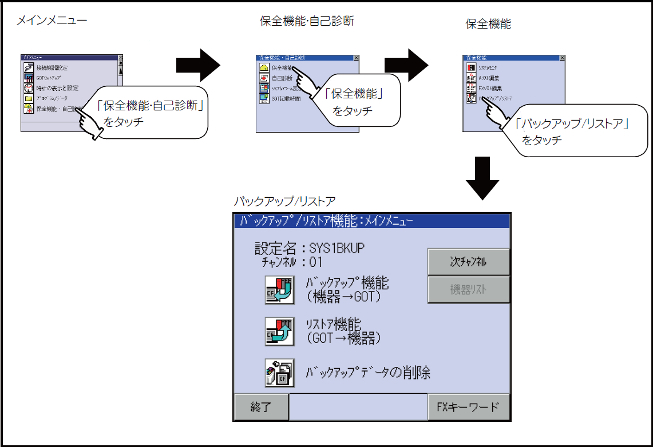
タッチパネル右上端を音がするまで長押しし離し[メインメニュー]画面を表示させます。
[保全機能・自己診断]→[保全機能]→[バックアップ/リストア]を選択します。
[バックアップ機能(機器→GOT)]を選択します。
以下 画面の指示に従ってバックアップ処理を完了させます。
※シンプルモーションユニット(サーボ系)のデータはバックアップされません。
GOT(操作ペンダントプログラム)のバックアップ
シーケンサーのプログラムをバックアップしたSDカードとは別のSDカードを操作ペンダントに挿入し、アクセススイッチをONにしアクセスランプを点灯させてください。ランプが点灯しない場合はGOTの電源を再投入してください。
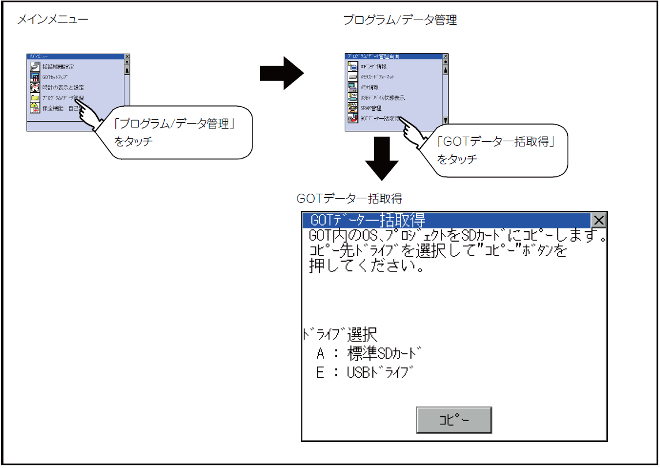
タッチパネル右上端を音がするまで長押しし離し[メインメニュー]画面を表示させます。
[プログラム/データ管理]→[GOTデータ一括取得機能]を選択します。
[A:標準SDカード]をタッチし反転させ[コピー]を押します。
以下 画面の指示に従って[コピー]を完了させます。
以上でバックアップは終了です。
PLCのリストア(シーケンサープログラムの復旧)
シーケンサープログラムをバックアップ済のSDカードを操作ペンダントに挿入し、アクセススイッチをONにし、アクセスランプを点灯させてください。ランプが点灯しない場合はGOTの電源を再投入してください。
タッチパネル右上端を音がするまで長押しし離し[メインメニュー]を表示させます。
[保全機能・自己診断]→[保全機能]→[バックアップ/リストア]を選択します。
[リストア機能(GOT→機器)]を選択します。
リストアするデータを選択します。
リストア先のユニット(Q00UCPU)を選択します。(黒丸にします)
[実行]を押します。
Statusにリストア中の表示がされるのでしばらく待ちます。
リストアが終了したらPLCの電源を再投入します。
GOT(操作ペンダントプログラム)のバックアップ
操作ペンダントプログラムをバックアップ済のSDカードを操作ペンダントに挿入し、アクセススイッチをONにし、アクセスランプを点灯させてください。ランプが点灯しない場合はGOTの電源を再投入してください。
GOTの電源を切りタッチパネル左上端を押しながら電源を入れます。
以下 画面の指示に従って[インストール]を完了させます。
* 不明な点がありましたら、三菱電機技術相談窓口(052-712-2417)にお問合せください。
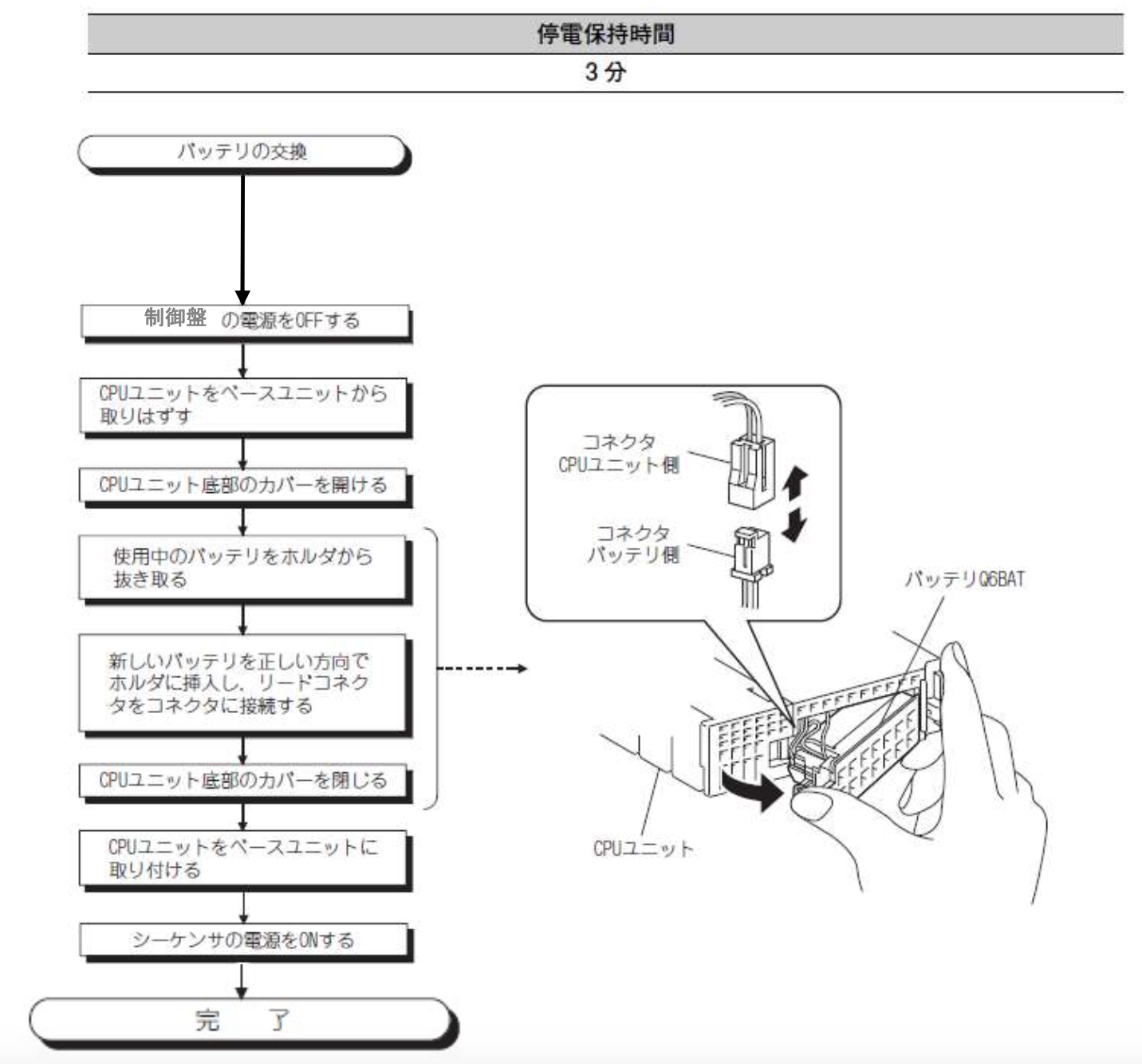
付録C 多軸サーボアンプ用 MR-BAT6V1の交換手順
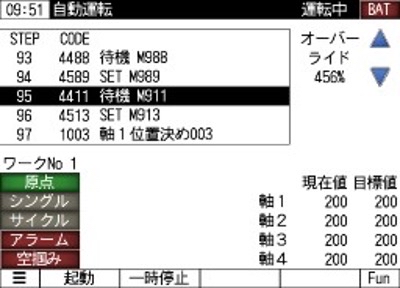
- (1)「自動運転画面」のBATランプが点灯したら、BATランプにタッチし、どのBATが低下しているかを確認し、サーボアンプのBAT低下であれば以下の手順でバッテリー(MR-BAT6V1)を交換して下さい。
- (2)制御盤の電源はオンの状態で非常停止ボタンを押し、運転準備ランプが消灯した状態にします。
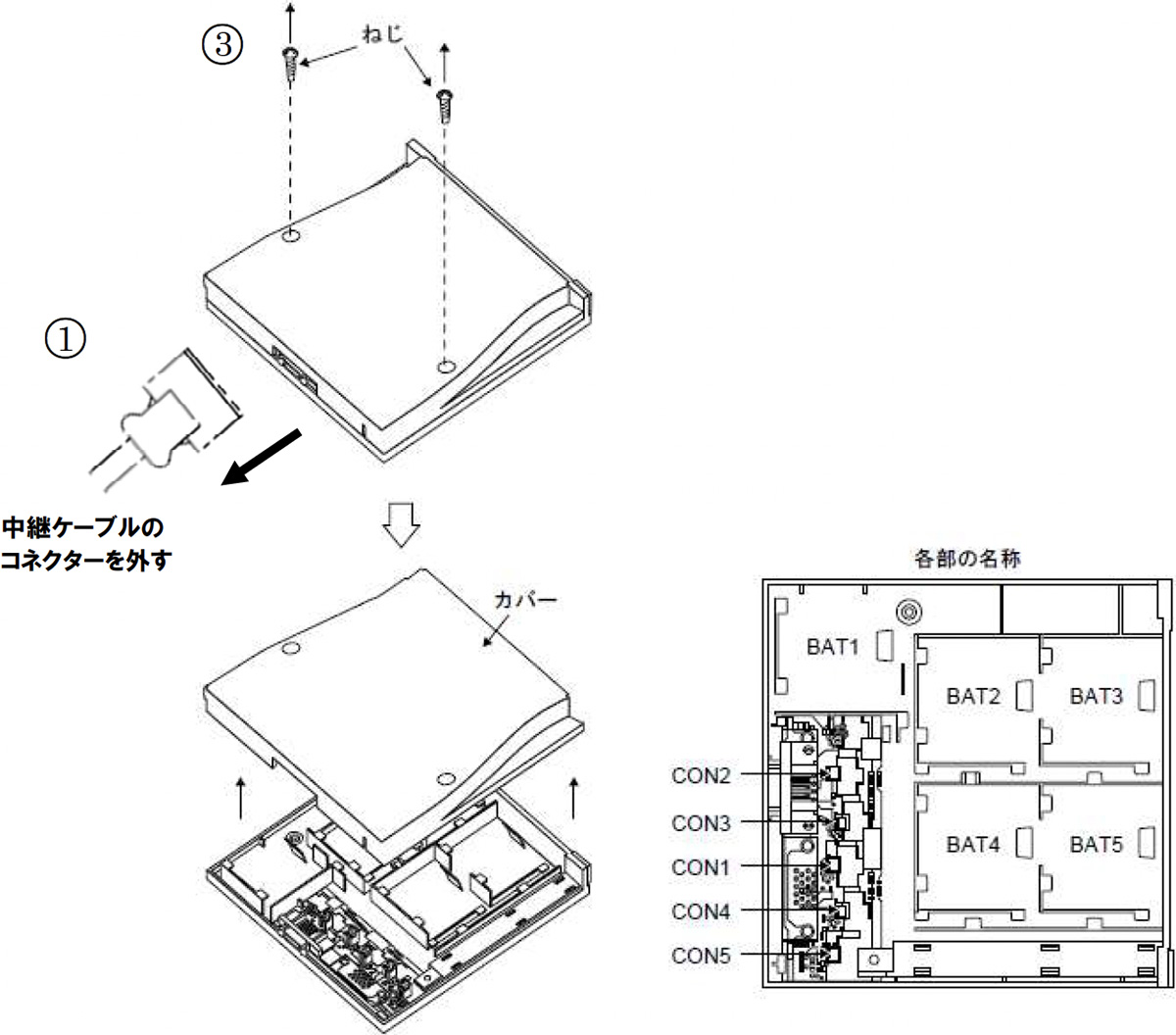
- (3)ケースの分解
MR-BAT6VCASEは組み上がった状態で出荷されます。このため、MR-BAT6V1を装着する場合、一度分解する必要があります。(MR-BT6VCASEの取付位置は提出済の取扱説明書【2】-(2)制御盤内部の配置図を参照下さい。)
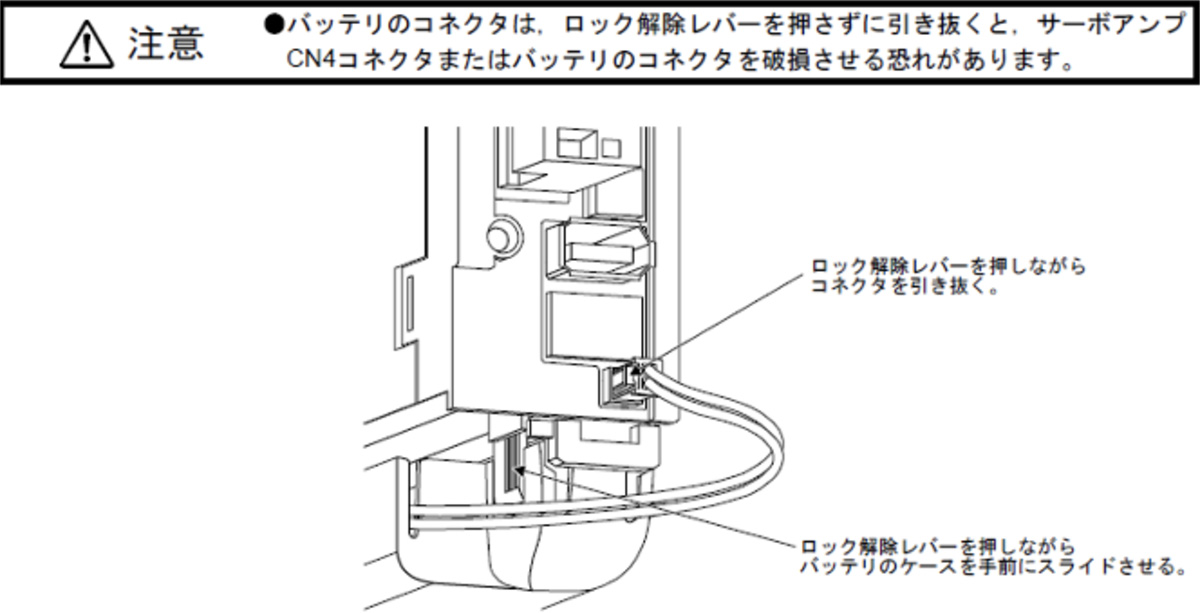
①中継ケーブルのコネクターを取外します。
②ケース全体を制御盤本体より2箇所の取付ネジを外し取出して下さい。
③2箇所のネジをプラスドライバーで外し、フタを外して下さい。
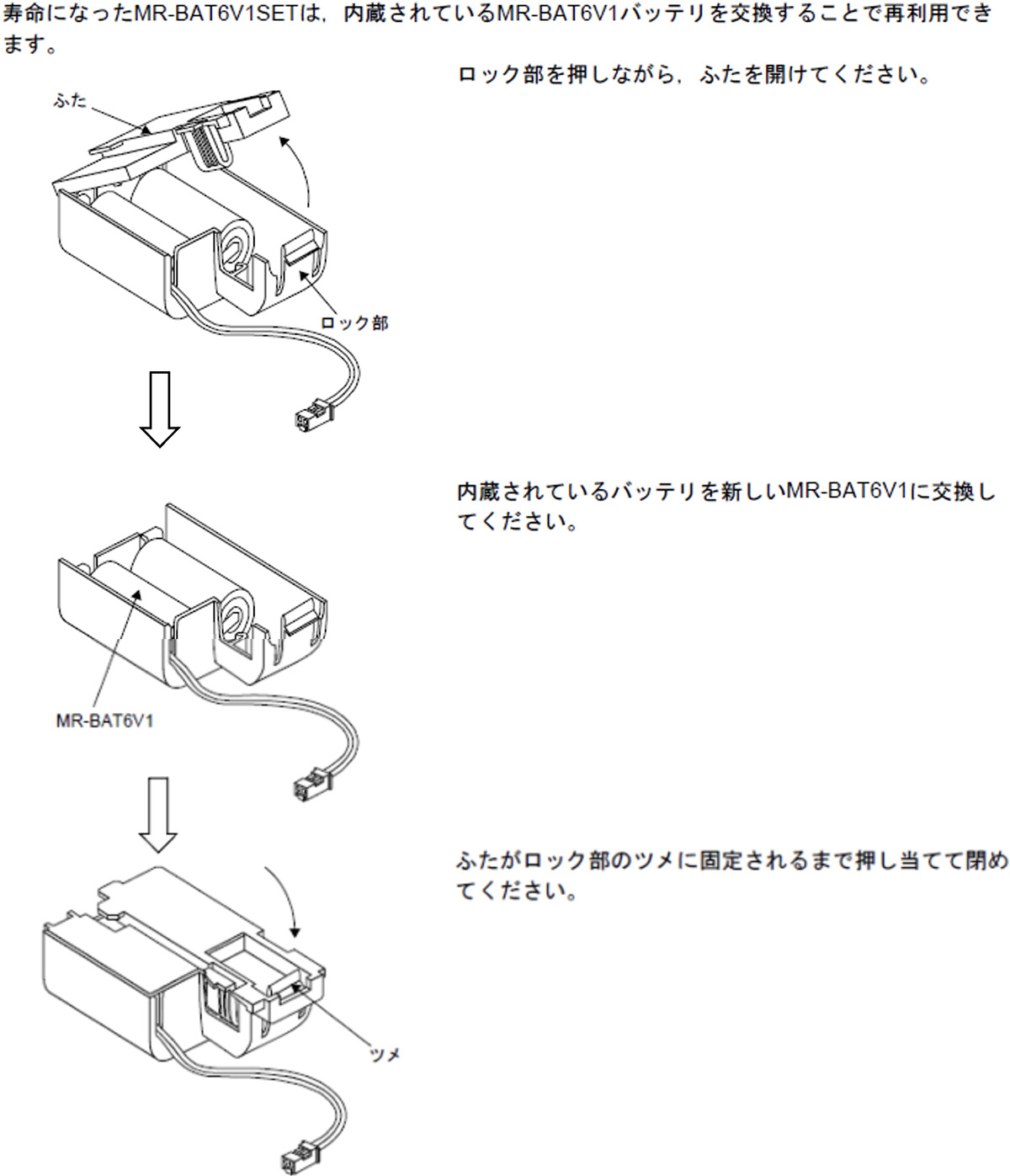
- (4)MR-BAT6V1の装着
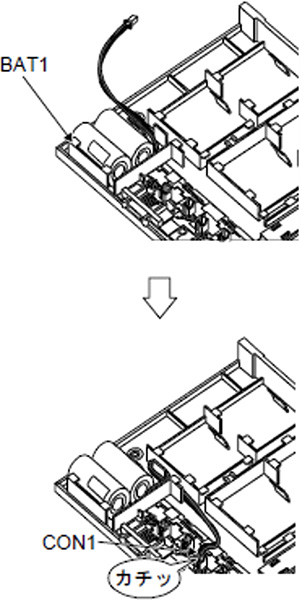 MR-BAT6V1をBAT1ホルダに確実に装着して下さい。BAT1ホルダに装着したMR-BAT6V1の
MR-BAT6V1をBAT1ホルダに確実に装着して下さい。BAT1ホルダに装着したMR-BAT6V1の
コネクターをCON1に挿入して下さい。
このとき“カチッ”と音がすることを確認して下さい。
コネクターは刺さる方向が決まっています。
刺さらない方向でムリに挿し込むとコネクターを破損します。
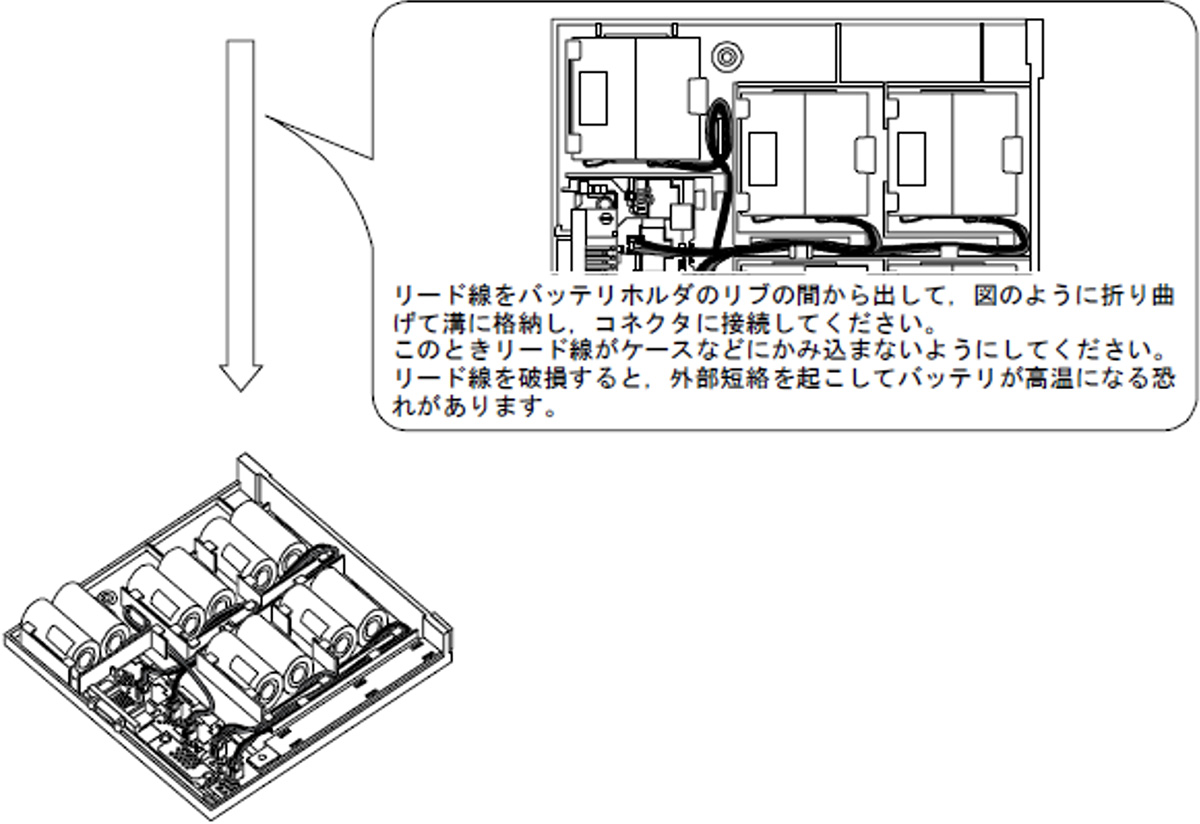
MR-BAT6V1のリード線をリード線収納用の溝に格納して下さい。
同様の手順でBAT2~BAT5の順番で、装着してある数だけホルダにMR-BAT6V1を装着して下さい。
付録E 自動プログラムの読み解き方
- (1)自動プログラムの構成
ロボットの自動運転は1~999ステップの自動プログラムに書かれた自動コード
命令に従って順次実行します。
| ステップ | 内 容 |
|---|---|
| 1~799 | 通常のユーザープログラムエリア |
| 800~830 | 自動原点復帰プログラムエリア |
| 831~999 | メーカー使用エリア |
- (2)自動プログラム作成例
次の動作フローのプログラム例を以下に示します。
使用するコードは「自動コード一覧表」参照。
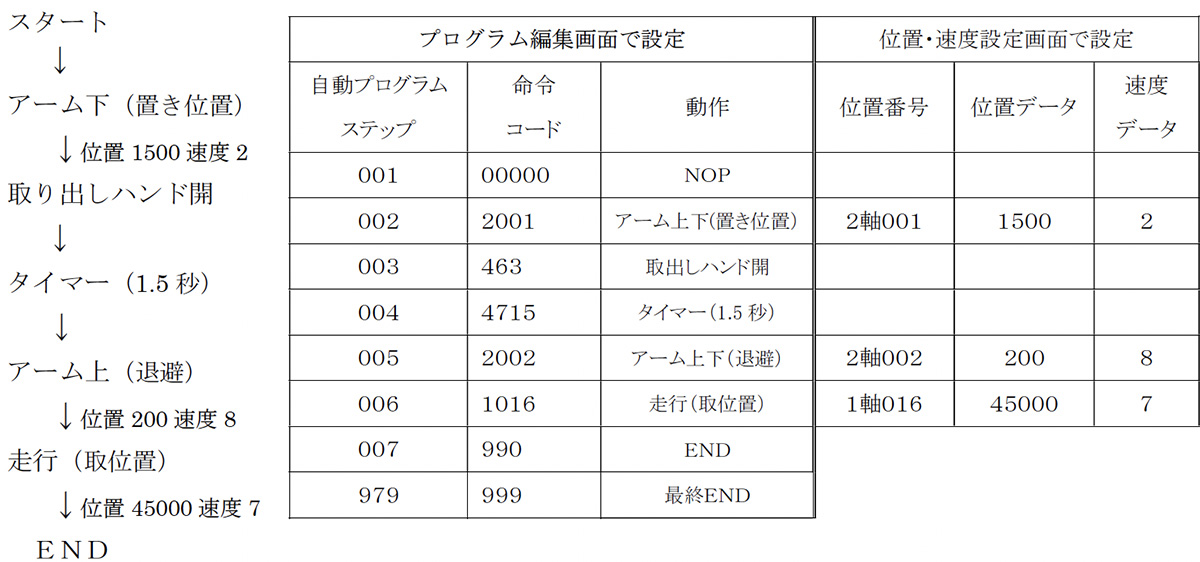
- 注1)位置データ・速度データはサーボ動作命令コード(1~600)と同じ位置番号に設定します。
- 注2) 位置データの単位は、×0.1mm(直行軸)/ ×0.01度(旋回軸)
自動コード一覧表1
| コード | 動 作 | 備 考 |
|---|---|---|
| 00 | NOP | |
| 42* | ハンド0° | *0の時はセンサーによる確認動作 1~9の時はタイマーによる動作数値の大きいほどタイマー値大 注)この欄のコード、動作は各ユーザー様毎に提出された取扱説明書をご確認ください。 |
| 43* | ハンド90° | |
| 44* | ハンド180° | |
| 45* | ハンド270° | |
| 46* | 取出しハンド開 | |
| 47* | 取出しハンド閉 | |
| 48* | 供給ハンド開 | |
| 49* | 供給ハンド閉 | |
| 1▲▲▲ | 1軸動作命令 | 1軸の▲▲▲位置データ番号(1~600)に設定されたポイントへ移動します。 |
| 2### | 2軸動作命令 | 2軸の###位置データ番号(1~600)に設定されたポイントへ移動します。 |
| 3◆◆◆ | 3軸動作命令 | 3軸の◆◆◆位置データ番号(1~600)に設定されたポイントへ移動します。 |
| 6■■■ | 4軸動作命令 | 4軸の■■■位置データ番号(1~600)に設定されたポイントへ移動します。 |
| 990 | プログラムエンド | この命令を実行しますと、プログラムの先頭(アドレス)へ戻ります。 |
| 999 | プログラム最終エンド | 自動プログラムの最終アドレスに必ず記入します。この命令コード以降のアドレスはデータ領域となります。 |
| 50** | トルク制限 1軸 | **0~99% 0を入れると既定値(300%) |
| 51** | トルク制限 2軸 | |
| 52** | トルク制限 3軸 | |
| 56** | トルク制限 4軸 | |
| 53** | オーバーライド1軸 | **0~99% 0を入れると100% |
| 54** | オーバーライド2軸 | |
| 55** | オーバーライド3軸 | |
| 57** | オーバーライド4軸 |
自動コード一覧表2
|
コード |
動 作 | 備 考 | ||||||
|---|---|---|---|---|---|---|---|---|
| 1**** | 同時動作 | ****はコード(5桁目に1を指定すると次の動作命令と同時に動作を始めます) | ||||||
| 42** | 正条件ジャンプ | **は条件(正論理) ジャンプ先は次のアドレスにジャンプ先コードを用いて指示する。 |
||||||
| 43** | 負条件ジャンプ | **は条件(負論理) ジャンプ先は次のアドレスにジャンプ先コードを用いて指示する。 |
||||||
| 40** | ジャンプ先 | ジャンプ先を指示するコード **は、1~60 |
||||||
| 41** | ジャンプエンド | ジャンプ命令により、本コードのアドレスへジャンプする。 **は、1~60 使用例
|
||||||
| 44** | ウェイト | **は条件 | ||||||
| 45** | セット | **の出力(内部、外部)をセット | ||||||
| 46** | リセット | **の出力(内部、外部)をリセット | ||||||
| 47** | タイマー | (**)×0.1秒 | ||||||
| 48** | タイマーチェック | 直前の命令の完了と、タイムアップの論理ORで歩進 タイムアップで歩進した場合は、条件NO.98をONする。 |
